
导言
线代大学时候就是噩梦,真的是学不明白,不知道行列式和矩阵,向量之间啥关系,感觉是3个独立的,又好像记得有联系。这个噩梦过去很多年后,突然发现,矩阵在机器学习里面很常用,比如PCA分析,黑森矩阵,协方差矩阵,正定啥的,一堆概念还得用线代的概念,不得不重新拾掇起来这些噩梦。
在B站上发现了下面的教程,好是赞噢,哥们讲的真是醍醐灌顶啊,几个小时的讲解完全秒杀几十个学时的大学时候的课程,难怪弹幕上的围观小伙伴纷纷表示,“我好像学了门假的线代”“幸好大学没有好好听线代(错过被老师虐死)”“膝盖都跪碎了”… … 。
把自己的心得写下来,留作自己阅读,看官如果看过这段视频,应该对以下内容很是会心;如果没有,看到也应该可以多少回忆起来一些线代噩梦;如果全无感,没关系,全都是我自己的喃喃自语。
B站线代神教学地址:http://www.bilibili.com/video/av6731067
线性组合和矩阵、线性变换
i,j都是长度为1,成为基向量, 俩个不共线的向量通过线性组合可以张成整个空间, “线性相关”就是他可以被别人线性表达出来,一般共线(二维)或者共面(三维)的某个向量可以被其他向量线性表达出来,
向量空间的一组基:就是张成该空间的。
线性变化两个特点:
- 1、原点不变
- 2原始网格按比例缩放保持直线不能弯曲。
线性变化本质上就是把基向量i,j变化到到对应的新的点上,对应的整体坐标系发生变换。

a,c就是i(1,0)变换后的坐标,b,d就是j(0,1)变换后的坐标, [x,y]就是原有的向量,[ax+by, cx+dy]就是变换后的向量 所以,矩阵本质是对一个变换的描述。
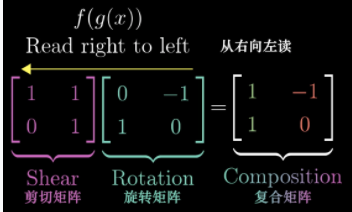
矩阵相乘,本质上就是复合变换,从右往左。
行列式
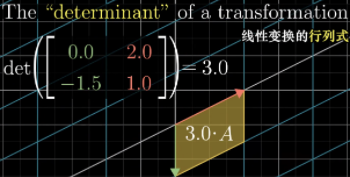
行列式本质是说,矩阵A表示的变换使得原来$i,j$围成的面积为1,变成了新变换后的基向量围成的面积是他的几倍。
当(二维)行列式为0时候,说明是讲整个平面压缩到了一个直线上,甚至一个点上。
行列式为负的时候,说明变换导致整个平面被反转了。
三维的时候,就是体积的缩放倍数,而正负表示$i,j,k$的顺序关系体现。
逆、秩、核
线性方程可以表示为,$AX=V$,其中$A$为系数,
这个方程的含义就是说,x向量通过$A$变换后,变成了$v$向量。
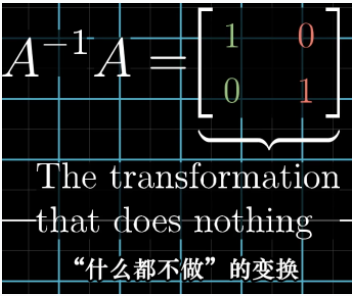
$A$变化后,在通过$A^{-1}$变换回去,就相当于又把基坐标变回了$i,j$
所以X求解就是$用A逆*V$:$ AX=V ==> A^-1*A*X = A^-1*X ==> I *X = A^-1*V X=A^-1 * V$
当然得看行列式 det(A):
行列式非零(就是面积不为0),有唯一向量X,通过A变换可以到V。
行列式非零(就是面积为0),2维空间被压缩成线,如果V在这条线上,那有无穷多解,否则无解。
“秩”表示变换后的维度,比如矩阵$A$把2维一不小心变换到了1维,那A的秩就是1,否则就是2。
核:当非满秩情况下,$A$变换压低了空间维度,一定会有一些向量被压缩到原点上,比如2维中的一条直线上的向量,或者3维上的一个平面上的向量,这些向量的总体集合称作这个矩阵A的“零空间”或者 “核”(<==???核函数跟这个有关么)
非方阵矩阵
如果一个2维的向量,去乘以一个3行2列的矩阵,是什么含义?就是升维了,把这个2维向量转化到了3维空间,i变成了$(2,-1,2)^T$,就变成了$(0,1,1)^T$,但是,变到了3维,这些向量还是在由i/j变换后的2个基向量$[(2,-1,2),(0,1,1)]$组成的那个平面里。
反过来,1个3维向量乘以一个2行3列的矩阵,如何理解?那就是降维了,从3维变换到了2维空间里。
点乘
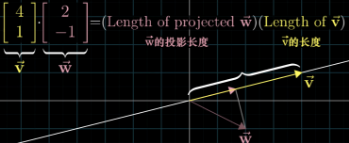
点乘(内积),就是一个向量在另外一个向量上的投影长度✖️另一个向量的长度,几何含义。投影到反方向延长线上,内积为负。当然也有0的时候,正交。
点乘看上去是两个向量之间的关系,但是可以换一个思路,就是把左面的向量看成一个变换矩阵了(不再是向量了),而右面的向量,按照变换,从给一个二维的向量,降维到第一个向量[1,-2]的对应的直线上,相当于做了一个降维。而内积就相当于,把[4,3]投影到了那个线段上后的一维向量。
高维的点乘,实际上还是把高维向量变换到一维空间上,比如$[2,3,-1,0] * [1,3,4,2],[2,3,-1,0]$就是告诉后面4维度的基向量中的4个值分别转化到一维上的值分别是$2,3,-1,0$。
基变换、相似
$A^{-1} * P * A * v = v’$
这个就是基变化的过程,理解为:
- v是jeniffer的世界里的向量,
- A是把她的坐标变换成我们的世界的坐标,
- P是在我们的世界做变换,
$A^{-1}$是把我们的世界变换回Jeniffer的世界,
最终,我们得到在Jeniffer的世界里,变换后的向量坐标。
(这里,把A不看做是一个变换,而是一个另一个变化后的空间的基的坐标,所谓你的世界)
基变换的意义在于你可以在一个你不好玩得开的一个世界的变换,带回到我们熟知的世界里耍,耍好了再变换回去即可。
上面的式子中,设$A^{-1} * P * A = B$,也就是B矩阵就是在另外一个空间的变换,那么这种情况叫做 P ~ B,P相似与B。
特征向量
特征向量就是做了变换后,并没有发生位移,只是在原始的方向上发生了伸缩的那些向量。伸缩的量就是特征值。
所以得出这个式子: $AV=\lambda *V$
$AV=\lambda*V$
$AV-\lambda*V=0$
$(A - \lambda*I) * V = 0$
把$A - \lambda*I$ 记做X的话,就变成 X*V = 0,
就是说V向量经过X变换后,成为了0向量,那么$|X|=0$,行列式为0啊,也就是说,X被变换成0向量了。
这个时候空间压缩会让行列式为0了,这样就导出计算$\lambda$值的方法,就是求行列式为零,
因为包含着$\lambda$为未知数,就得到了方程,解出$\lambda$就得到了特征值。
特征值得到后,带入。
特征向量可能会有多个,比如上面的例子,$\lambda$=2时候,特征向量会有无穷多个。
也可能不存在任何特征向量,比如就是单纯旋转,这个时候,没有哪个向量会呆着他伸缩的轨道上了。
在n维空间中,那单位n个单位向量能构成一个基.但,基不是唯一的,任何个数为n的线性无关向量组都能构成n维空间的一基.基向量不需要正交。
如果特征向量恰好可以作为一个向量空间的基,那么就可以用
上面中间的矩阵是一个变换,两边的矩阵A和A逆是这个夹在中间的这个矩阵的特征向量。
基向量逆 * 变换矩阵 * 基向量(同时也是特征向量) = 特征值的对角矩阵 , 这就是相似对角化!
矩阵本身的含义就是基向量变换后的坐标,
现在你把特征向量当做基向量,他在原空间(非特征向量为基的原来的那个空间)上的变换,这两个基就是简单地缩放(缩放比例为特征值)。
理解正定!!!!!!
其他资料
下面的内容是其他学习材料中的资料,也保存下来,方便记忆和理解。
矩阵
奇异矩阵:$|A|=0$,A为奇异矩阵
代数余子式:去掉指定元素所在i行,j列后的行列式的值,记做Mij
伴随矩阵:$A^*$,就是每个元素都是去掉这个元素所在i行,j列后的代数余子式:
$A_{ij}=(-1)^(i+j) *Mij$,
得到的这个矩阵还得转置一下,
$AxA*= A*xA=|A|xE$
初等矩阵:E经过1次变化得到的矩阵(三种,交换行;k乘以某行;k乘以某行然后加到另外一行)
$|A|=0$
矩阵行变换后,肯定有全0行,所以$|A|=0$
他作为齐次线性方程组组的系数矩阵的话,可以推出方程有N个非零解
秩$r(A)<n$, 直观上有全零行,非零行就是秩,所以不满秩
$|A|!=0$满秩,$r(A)=n$A可逆 叫做非奇异矩阵
A的各行、各列组成的向量组线性无关 $Ax=4$,只有零解 ????这个需要论证 $Ax=B$,有唯一解 A与E等价
- 矩阵相似 $P^{-1}AP = B$ ,A和B相似,相似比等价强
- 矩阵等价 $PAQ=B$ ,P、Q都是可逆的,A、B等价意味着A=>B(A经过初等变化可以得到B)表示成
- 矩阵正定 $X^T*A*X>0$ ,A为正定阵,>=0, 半正定;正定阵特征值都是正,对称阵是正定阵
- 矩阵可逆 行列式$Det(A)=0$,就是可逆的。
- 矩阵合同 $P^TAP = B$ P可逆,A和B合同, 合同比等价强,合同和相似没有任何关系(除非这个矩阵是正交矩阵),正交合同和
- 正交矩阵 $PP^T=E$ ,$P^{-1}=P^T$,正交矩阵的逆等于他的转置
逆矩阵
求法:
-
$A^{-1} = \frac{1}{|A|} x A^*$ 参考伴随矩阵的性质
-
做初等变化得到 $(A|E)=>(E| A^{-1} ) $, 原因是A可逆,A就是满秩的,满秩的就可以写成一系列初等矩阵的乘积(初等矩阵的性质)
极大线性无关组不唯一,
向量&向量空间
- n维向量组成组成m行矩阵,如果矩阵秩$r(A)<m$,向量组线性相关;$r(A)=m$,向量组线性无关.(跟矩阵的线性无关判定一样)
- 向量组线性无关,向量组每人维度+1,她们之间还是线性无关.
- 向量组的等价:俩向量组彼此可以线性表示.
- 极大线性无关组的向量个数叫向量组的秩.
- 基: 指这样一个向量组,它可以表示向量空间的所有的向量,并且他们之间线性无关.
- 也就是极大线性无关组,个数就是组成矩阵的秩.
- 如何求秩\基\极大线性无关组: 是把向量按照”列!”方式码放,然后做行变化,化成梯形阵, 或者按照”行!”方式码放,然后做列变化,化成梯形阵, 向量组的任意两个极大线性无关组包含向量个数相等. 等价向量组的秩相同.
二次型,是由高中的二元二次方程,大学的三元二次方程(曲面),的推广到N元。 它可以拆成 X(T)AX的样子 A可以存在多个,但是对称的只有一个,这样二次型的矩阵就是指这个对称矩阵A, 这个矩阵是对称阵, 这个矩阵的秩就被叫做二次型的秩, 正定性: $f(x)=X^t * A * X >0$, 判定:all特征值>0 半正定: $f(x)=X(t) * A * X>=0$,判定:all特征值>=0
对角阵:对角线上元素不全为0,其他位置都是0 标准型:就是左上角是单位阵的矩阵,其余字块都是0的分块矩阵 行最简形矩阵:使用行变化化成最最简单的矩阵形式,(参见线性方程组第一讲) 对角化: 把一个矩阵化成一个对角阵,$P^{-1} * A * P= V$(特征值组成的对角阵), 条件是, A有N个特征值,对应特征向量线性无关 正交矩阵
特征向量
$AX=lambda*X$
$\lambda$是特征值,$X$是特征向量,
一个矩阵和向量的结果,居然变成了一个常数乘以向量,感觉用一个数表示了A一样,所以$\lambda$是$A$的特征值.
$|A-\lambda*I|=0$,行列式为0,可以求出$\lambda$, 不同特征值对应的特征向量彼此线性无关,也就是彼此无法线性表出 求特征值和特征向量的方法:$|A - \lambda * E | = 0$,解出$\lambda$,然后$(A-\lambda E)X=0$,所有的X都是特征向量.
若A 与B 行等价,则A 与B 的行秩相等
实对称阵的一些性质:
1.实对称矩阵A的不同特征值对应的特征向量是正交的。
2.实对称矩阵A的特征值都是实数,特征向量都是实向量。
3.n阶实对称矩阵A必可对角化,且相似对角阵上的元素即为矩阵本身特征值。
矩阵A可逆 ==> 矩阵A的列向量是此空间的一组基,也就是她们之间线性无关
矩阵A是正交矩阵 ==> 矩阵A的列向量是此空间的一组标准正交基(注意是标准正交基,也就是Ri的模为1)。
线性方程组求解:
求法是把矩阵化成最简型,然后确定自由变量,然后分解出通解!
相似对角化
相似对角化,目的是为了把一个矩阵变换成一个对角阵:
$Q^{-1} A Q = \Lambda $ , 其中 $\Lambda是一个对角阵,对角线上是特征是\lambda_i$。
这个Q怎么求呢?实际上,就是每个$\lambda_i$对应的特征向量们,合体成的矩阵Q。
不是所有的A都能这样对角化,得有n个特征值的A,才可以真么玩。
接下来的问题是:干嘛要对角化呢?有啥好处呢?
【实对称阵的相似对角化】
如果是实对称阵,那么,它肯定是正定的,他有个性质:
$Q^{-1} A Q = Q^T A Q = \Lambda$
这个时候,矩阵A与$Q^{-1} A Q$ 的关系,被叫做正交相似。
施密特正交化
说白了就是根据一组线性无关的向量组,如何计算出一组正交的线性无关向量组。玩法如下:
就是先把其中一个向量当做第一个正交向量,
然后第二个正交向量求法是,用第二个向量减去第二个向量在第一个向量(也就是正交向量)的投影向量,即可。
但是求第三个时候,得用第三个向量减去它在前两个求出来的基向量上的投影向量,即可得出。
后面以此类推,每次越减越多,直到最后一个。
这样就得到了一组正交基,如果是标准正交基的话,再对她们进行单位化(分别除以自己的模)。
PCA
PCA干嘛用的呢?
我的理解就是降维,当维度比较高的时候,就通过它把维度降下来。比如一个图像200x200,其实上是40000维度,但是通过PCA得到相关的维度可能只为100维度,大大降低数据维度。
总结一下PCA算法步骤: 设有m条n维数据。
- 1)将原始数据按列组成n行m列矩阵X
- 2)将X的每一行(代表一个属性字段)进行零均值化,即减去这一行的均值
- 3)求出协方差矩阵
- 4)求出协方差矩阵的特征值及对应的特征向量
- 5)将特征向量按对应特征值大小从上到下按行排列成矩阵,取前k行组成矩阵P
- 6)Y=PX即为降维到k维后的数据
注意!!!
- 矩阵P是由C的特征向量组成的,而且是由比较大的特征值对应的向量组成的。
- 这个特征向量已经是完全和之前的特征值无关的了,之前是40000维度哈,现在呢,只是k了,这k可不是从40000里跳出来的,而是完全没关系的,只是通过特征值分解得到的了。
- 另外,特征值得出的所依赖的矩阵C,也不是原始的X,是X和他转置相乘的结果,是一个对称阵(对称阵才可以得到正定的特征值),而且X也不是原来的我,而是均值化的了,我早已不是我了
- 总而言之,整个数学变化,就是为了得到对应的特征向量
参考
http://www.cnblogs.com/zhanjxcom/p/4119509.html
http://blog.codinglabs.org/articles/pca-tutorial.html
涉及到概念:
实对称矩阵的对角化:小象的数学《5.2实对称矩阵的对角化》
SVD分解 小象学院的《课时9 视频4 矩阵和线性代数》